Steigner (Martin Juříček) · GitHub
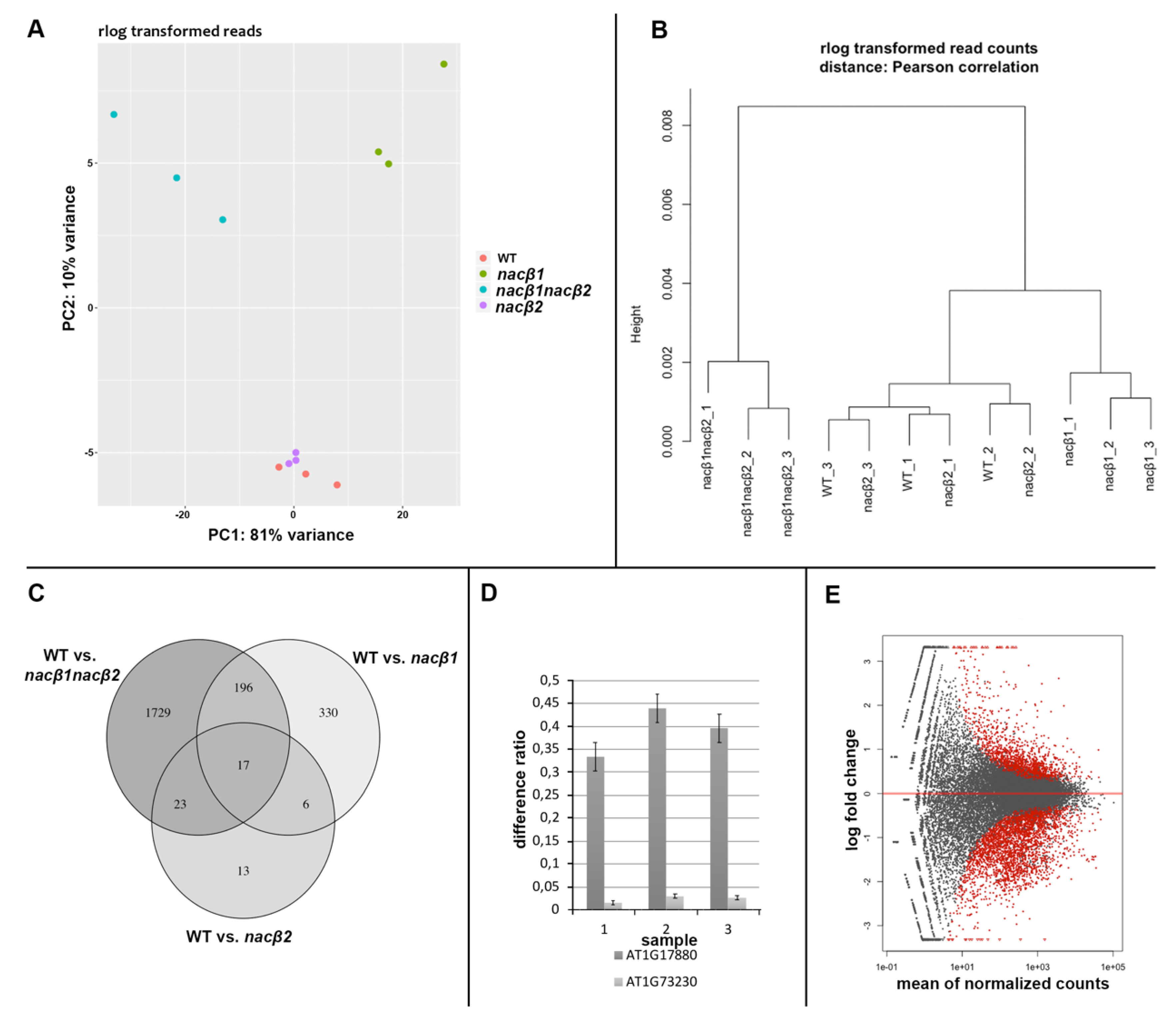
IJMS, Free Full-Text

Inside the Virtual Robotics Challenge: Simulating Real-Time Robotic Disaster Response

Basic structure of agent-environment interaction in Markov's

Learning environment of the UR3 model in the RVIZ simulation tool.

Minimization of Euclidean distance accuracy error for each of the

PDF) A Robust Voice Pathology Detection System Based on the Combined BiLSTM–CNN Architecture

Movements of the proposed 2-DOF robotic end-effector during the

Robot Operating System (ROS) Universal Robots Web Human-Machine Interface (HMI)

Basic structure of agent-environment interaction in Markov's
Martin Juříček - AI Engineer - FRAVEBOT

Robot Operating System (ROS) Universal Robots Web Human-Machine Interface (HMI)

Martin Juříček - AI Engineer - FRAVEBOT

Martin Juříček - AI Engineer - FRAVEBOT

Flexible transoral robot. (A) The robotic system; (B) The flexible

Results of RL/DRL learning techniques for the goal achievement experiment